© NASA/JSC
Attitude Dynamics - 姿勢力学
宇宙システムに課された目的を達成するためには、その目的に合わせた高精度な姿勢制御技術が必要になります。姿勢計測に必要となるセンサーや、姿勢制御に必要となるアクチュエーターに関する要素技術の研究開発に加え、小型高性能宇宙システムとしてのシステムインテグレーションやデータフュージョン、地上評価等の技術の研究開発に取り組んでいます。
研究概要
Overview
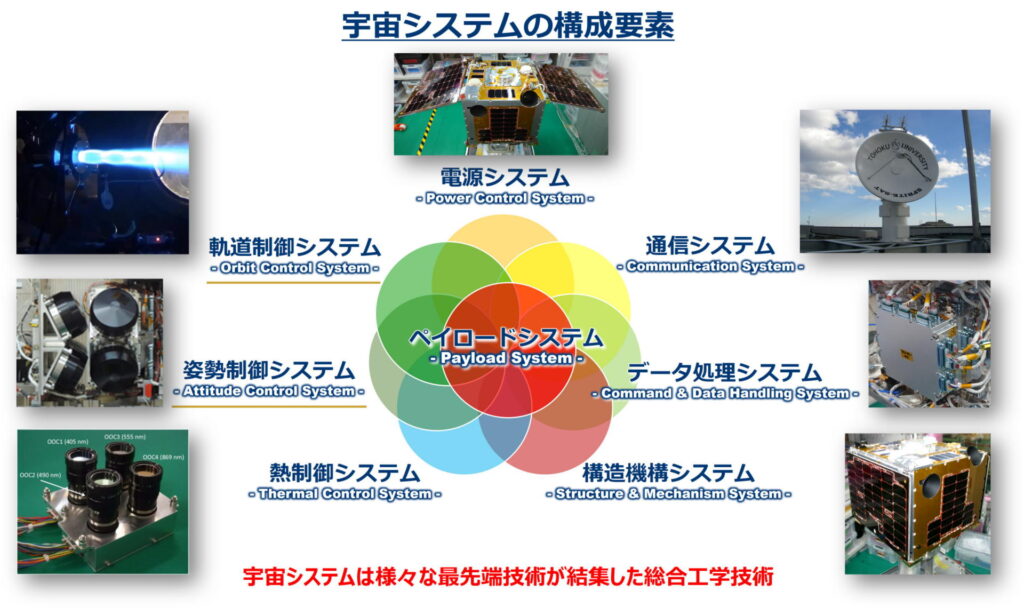
近年、宇宙システムは宇宙インフラを構成する重要な要素として様々な分野で活躍しています。例えば、人工衛星は「通信」「測位」「観測」「軌道上サービス」といった重要技術領域に分類され、それぞれの目的を達成するために高度な姿勢制御技術が求められます。また、人工衛星以外にも宇宙ステーションや軌道間輸送機、月・惑星探査機など様々な宇宙システムがあり、姿勢制御技術はそれらのミッションを達成するための宇宙システムの根幹を成す機能であると言っても過言ではありません。
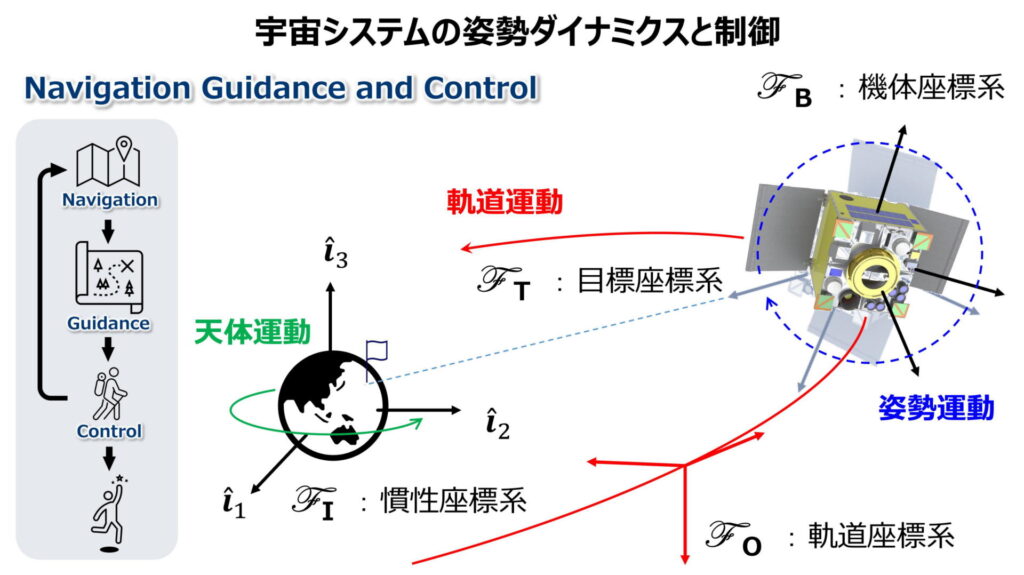
姿勢制御技術は、宇宙システムの姿勢を決定する技術と、制御する技術の二段階に大きく分類されます。姿勢決定のためには、様々なセンサー技術と宇宙空間の物理モデルに関する知見が求められます。姿勢制御のためには、様々なアクチュエーター技術と宇宙システムのダイナミクスに関する知見が求められます。さらに、これらの機能を地上で検証するための数値シミュレーション技術やHardware-in-the-Loop試験技術に加え、実際の軌道上での動作を実現するための運用技術なども必要不可欠であり、これらの技術を融合することで、宇宙システムのミッションの遂行を実現します。
姿勢制御システムと、軌道制御システムの関係性は強く、姿勢軌道制御系と総称されることもあります。
研究事例
Research case
小型宇宙機の姿勢制御
宇宙機の姿勢とは、特定の基準座標系と、宇宙機の持つ任意の基準軸との関係を指します。高度な宇宙利用ミッションの遂行には、この姿勢を正確に制御・維持することが不可欠です。例えば、目標天体や地球上の目標地点の観測や撮像を行う際には、衛星に搭載される観測機器を高精度に指向し続ける必要があります。他にも、通信回線の安定確保のためのアンテナ指向や、衛星温度の調整や発電量を最適化するための太陽方向に対する制御など、複数の姿勢要求を同時に満たすための高度な姿勢制御アルゴリズムが求められます。
当研究分野では、超小型宇宙機開発の経験を通して、超小型特有の姿勢制御上の課題を明らかにし、その精度向上に取り組んできました。その成果の1つに「ターゲットポインティング制御」があります。この技術は、観測機器を目標へ指向・追従させることにより、カメラの視野を特定の緯度・経度に固定し、視野内の対象物体の見かけの動きを抑えることで、長い露光時間での撮像を可能にする手法です。当研究室では、小型宇宙機に搭載される限られた計算資源でもリアルタイムに動作し、安定した追従性能を実現できる軽量なアルゴリズムとなるよう開発しました。実際にこれらのアルゴリズムは、当研究室が開発したDIWATA-2およびRISESATにおいて軌道上実証され、高速な軌道運動の最中でも高解像度の撮像が可能であることが確認されました。
これらの蓄積された技術や成果は、軌道上でのランデブードッキングやデブリ捕獲といった将来ミッションへも応用可能です。今後は、より複雑化する宇宙利用ミッションの遂行に向けて、姿勢制御技術のさらなる高精度化・高機能化を目指します。
姿勢運動の数値解析と地上検証
当研究分野では、宇宙環境を忠実に再現した姿勢運動の数値解析や、微小重力環境を模擬するテストベッドを用いた地上試験により、宇宙機の姿勢をより高精度に推定・制御するための技術開発を進めています。実軌道上では、アクチュエータやセンサの故障など、さまざまな予期せぬトラブルが発生する可能性があります。そのため、姿勢制御システムは通常、冗長構成で設計されますが、重大な故障が生じた際には、残存する機器の組み合わせでどこまで姿勢要求を満たせるか事前に検証する必要があります。数値解析では、機能が制限された条件下において、制御機器の組み合わせや演算手法の工夫により、所望の姿勢表現が可能かを評価します。これらの解析から得られる知見は、衛星搭載機器の削減、コスト削減、ハイブリッドな姿勢制御システムの構築に大きく寄与します。
また、当研究室が開発した衛星テストベッド”DCLS”は、球状エアベアリングによって試験体を空気浮上させることで、宇宙空間に近い3軸回転運動を実現する実験システムです。超小型衛星規格のテストベッドにセンサやアクチュエータを搭載することで、微小重力環境に近い条件で姿勢制御系の動作試験・地上評価が可能となります。一方で、エアベアリング方式のテストベッドは構造上、実機と比較して慣性パラメータに誤差が含まれることが課題です。当研究分野では、この課題に対し、慣性パラメータの高精度推定や重心位置調整の自動化など、地上試験の精度向上に向けた研究に取り組んでいます。
数値解析と地上試験を組み合わせた総合的な検証環境の構築により、小型宇宙機の信頼性向上と高性能化を支える技術基盤の確立を目指しています。
姿勢制御系のシステムインテグレーション
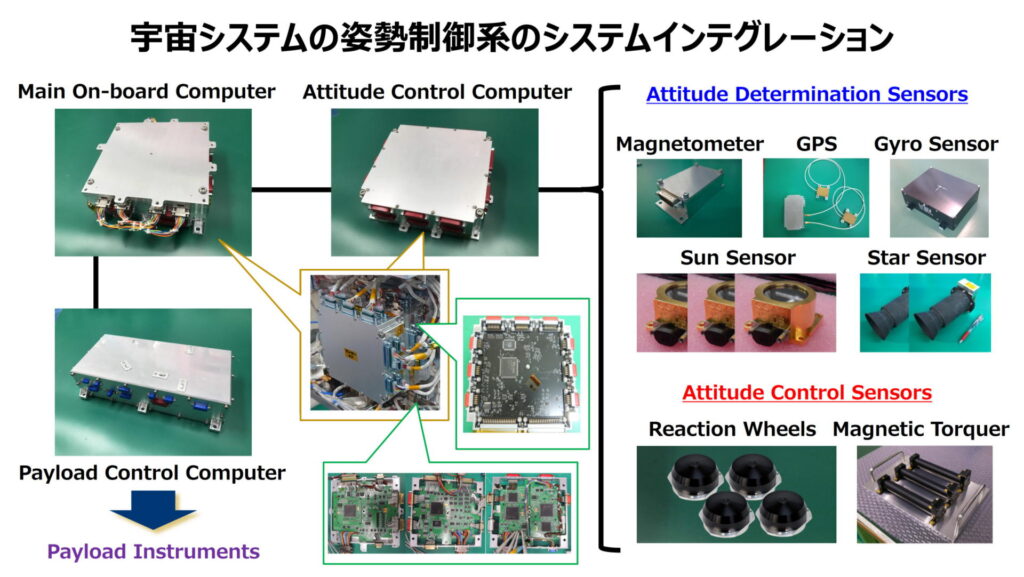
実際に衛星の姿勢を制御するためには、衛星の姿勢を検知するセンサ、姿勢運動を変化させるアクチュエータ、そしてこれらを統合的に運用する計算システムとアルゴリズムが不可欠です。当研究分野では、これらの要素を個別に検討するのではなく、衛星ミッションの要求に応じて全体として最適に機能する姿勢制御系を構築するため、システム全体を俯瞰した統合的設計に取り組んできました。
姿勢制御系のインテグレーションは、常時一定のテーマとして取り組むのではなく、開発プロジェクトの進行に合わせて必要となる工学的検討を柔軟に行っています。具体的には、姿勢推定および制御演算を実行する軌道上計算システムの設計や、ミッション要求に応じたリアクションホイールや磁気トルカ、GPS受信機、太陽センサ、スタートラッカーといった制御機器の選定と最適配置、さらに機器の取り付け構造の検討、取り付け誤差の補正手法、振動特性の評価に至るまで、姿勢制御系全体を統合的に設計・検証しています。