On-orbit Servicing - 軌道上サービス
近年の混雑化が進む宇宙空間の持続的利用可能性を確保し、将来の宇宙経済の継続的発展を可能にするための最重要技術が軌道上サービス技術です。宇宙デブリの除去・低減や、人工衛星の燃料補給・修理等の発展的宇宙活動を可能にする、将来の宇宙インフラ基盤の要となる先端宇宙ロボティクス技術の研究開発に取り組んでいます。
研究概要
Overview
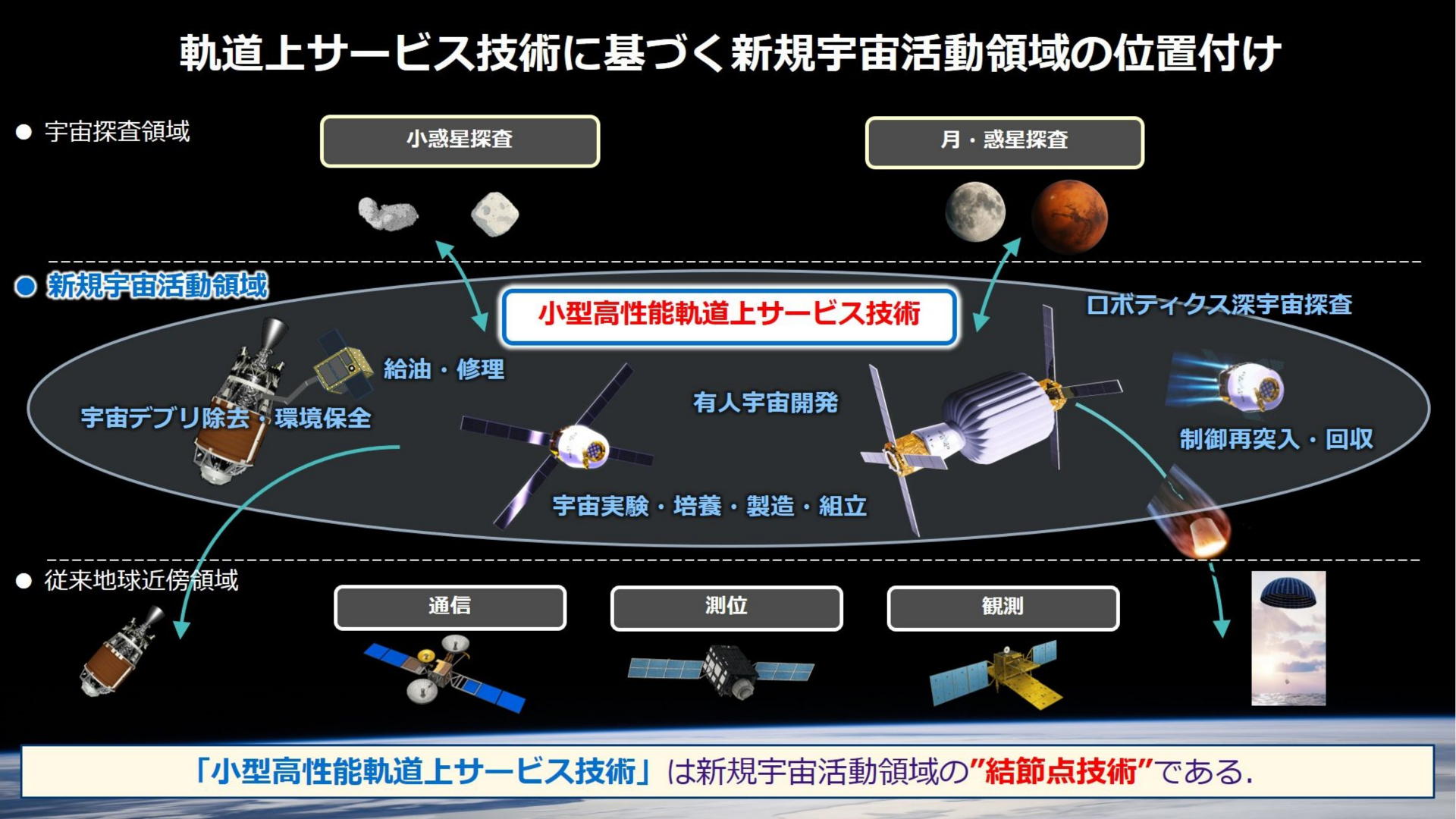
近年、宇宙利用の拡大に伴い、多くの人工衛星や宇宙機が開発・運用されています。その一方で、運用を終えた衛星や使用済みロケットが軌道上に残留し、運用中の衛星や宇宙活動に衝突リスクをもたらす「スペースデブリ問題」が深刻化しています。この問題を解決し、持続可能な宇宙利用を実現する将来技術として注目されているのが「軌道上サービス技術」です。
軌道上サービスとは、宇宙空間においてサービス衛星(チェイサー)が対象宇宙機(ターゲット)に接近し、燃料補給、修理、除去、制御支援などを行う技術であり、宇宙機の寿命延長や宇宙環境の保全を可能にします。特に、故障衛星やロケットの残骸などのドッキング機構や通信機能を有さない「非協力なターゲット」は、相対運動の不確実性、姿勢の自律安定性の欠如、質量特性の未知性といった課題を克服する必要があり、実現には高度なロボティクス技術が不可欠です。当研究領域では、スペースデブリ除去や燃料補給といった軌道上サービスの実現を目指し、相対ダイナミクスの推定、質量特性の同定、ならびに相対誘導・制御技術の研究開発に取り組んでおり、次世代の宇宙インフラを支える基盤技術の確立を目指しています。
研究事例
Research case
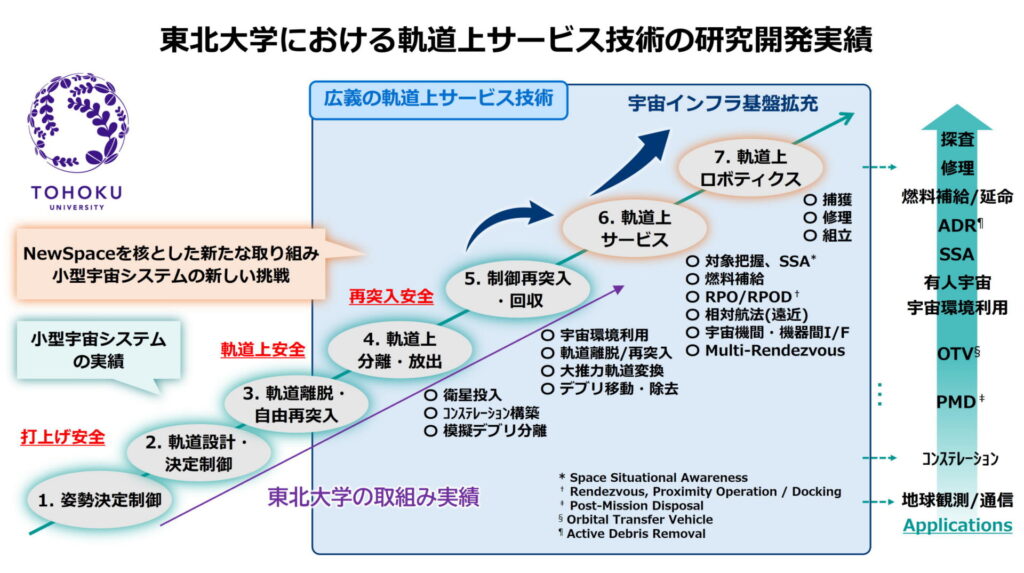
東北大学における軌道上サービス技術の研究開発実績
当研究室では、小型宇宙機の開発から軌道上運用に至る一連の研究開発を通じて、人工衛星の姿勢・軌道決定および姿勢・軌道制御に関する小型宇宙システムの航法・誘導・制御の技術基盤を構築してきています。また、宇宙機の打上げ時から軌道上運用までを対象とした安全確保に関する技術基盤の整備にも継続的に取り組んでいます。
近年は、小型宇宙システムのさらなる高機能化を目指し、宇宙機の制御再突入および回収を実現する再突入安全技術の構築に加え、軌道間宇宙輸送機、積極的デブリ除去宇宙機、さらには有人宇宙機を含む宇宙インフラ基盤の拡充に向けた軌道上サービス技術へと研究領域を拡大しています。これまでに蓄積してきた宇宙実証の成果を基盤として、宇宙機の自在な空間移動技術の確立、ならびに持続的な宇宙環境利用に資するスペースデブリの移動・除去技術の実現を目指し、宇宙機の航法・誘導・制御技術を中核とする軌道上ロボティクス分野の技術確立に挑戦しています。
軌道上サービスの要素技術
スペースデブリの移動・除去を目的とした軌道上サービスを実現するためには、対象となるデブリを安全かつ確実に捕獲するための捕獲戦略の確立が重要な要素技術となります。そのためには、軌道上に存在するデブリの並進運動および回転運動に加え、太陽からの受光条件などの宇宙環境を適切に模擬する手法が不可欠です。宇宙機の姿勢・軌道に関する運動方程式を解くとともに、太陽を含む天体の位置関係に基づいて日照および日陰条件を数学的にモデル化することで、宇宙空間における任意の宇宙機の状態を表現することが可能となります。
次に、サービス宇宙機がターゲットへ接近する航法過程においては、ターゲットの回転運動を高精度に把握することが不可欠です。特に通信が困難な非協力的宇宙機を対象とする場合には、サービス宇宙機に搭載される光学センサを用いた航法手法や、機械学習を活用したAI航法により、ターゲットの運動状態を推定します。
さらに、サービス宇宙機によるターゲットの運動推定に加えて、ターゲット形状の把握を行うことで、安全に捕獲可能な部位を特定します。その後、ロボットアームを用いたターゲットの捕獲制御を実施しますが、軌道上における複数宇宙機間の接触運動は、機体損傷のリスクを伴うため、極めて高度な制御技術が要求されます。
当研究領域では、ターゲットの捕獲にかかる一連の過程を対象として、宇宙機の相対運動を扱う航法・誘導・制御の各分野における研究に取り組んでいます。
宇宙デブリに対する近傍運用技術
サービス宇宙機がターゲットに対して近傍運用を行う際には、サービス宇宙機のランデブー制御による近傍接近制御に加え、ターゲットとのドッキング制御を実施します。サービス宇宙機がターゲットから約2 キロメートル以下の相対航法領域に突入した際、ターゲットの回転運動を逐次推定しつつ、その相対航法情報に基づいて、推進装置を用いながらターゲットへ接近します。
従来のランデブー制御では、ターゲットの回転運動を考慮せず、所定のドッキング条件を満たすことを目的とした誘導制御が主に検討されてきました。これに対し、当研究領域では、推定したターゲットの回転運動にサービス宇宙機の運動を同期させる誘導制御手法を提案することで、ランデブー制御に要する制御時間の短縮および制御安定性の向上を実現します。
さらに、ターゲットまで数 メートル程度まで接近した段階では、制御領域をロボットアームによる接触力学を考慮した制御へと移行し、ターゲットの捕獲運用を行います。
非接触型宇宙デブリ除去・低減技術
スペースデブリ除去手法として、ロボットアームを制御することでターゲットを捕獲する接触型手法に加え、サービス宇宙機からターゲットへ軌道離脱用装置を放出・貼り付ける非接触型手法の構築に取り組んでいます。非接触型手法の特徴は、軌道上において高度な制御が要求されるロボットアームによる接触運動を考慮する必要がない点にあり、これにより、デブリ除去運用時におけるサービス宇宙機の衝突や機体破壊といったリスクの低減が期待されます。
当研究領域では、膜展開式軌道離脱装置DOM(De-Orbit Mechanism)を改良した接着型膜展開式デブリ除去装置DOMDAN(De-Orbit Mechanism Docking Adhesive Node)の検討を開始しています。DOMDANは、ターゲットに取り付けられた後に薄膜展開構造物を展開することで大気抵抗を増大させ、ターゲットを軌道離脱へと導くことを目的とした装置です。ターゲットへの放出・接着手法に関する地上実験を通じて、非接触型デブリ除去手法の実現性の評価を進めています。これらの検討を通じて、将来的な軌道上サービス技術として実用化可能なスペースデブリ除去システムの確立を目指しています。