Planetary Robotics - 惑星探査ロボティクス
月・惑星や小天体の探査を通し、宇宙や人類の起源の探求や、レアメタル等の宇宙資源の探索・利用、人類の宇宙活動拠点の構築等が可能になっていきます。月・惑星や小天体の表面探査や、それらの環境における有人宇宙活動支援のためのロボティクス技術の研究開発に取り組んでいます。
研究概要
Overview
月・惑星探査ローバーは、天体表面に近接した詳細な調査を行える点で有用であり、資源探査や生命探査などに広く活用されています。現在は地球からのテレオペレーションによって運用されていますが、指令伝達に伴う通信遅延が大きな課題となり、操作の効率を著しく制限しています。そのため、探査の効率化には人の操作が介在しない自律的探査技術の開発が課題となっています。
当研究領域では、この課題解決に向けて、探査ローバーの空間認識および行動決定の自律化に関する研究を進めています。ロボットが多様な状況下で適切に行動するためには、周囲環境の精緻な把握と、正確な自己位置推定が重要です。その中核技術として、これまで同時自己位置推定・地図構築(Visual SLAM)が盛んに研究されてきています。しかしながら、従来の研究の多くは特徴豊かな地上環境を前提としており、視覚的特徴が乏しい月・惑星環境への適用には課題があります。そのため、視覚的手がかりが限られた環境においても正確な環境理解を可能にする技術の確立を目指しています。
研究事例
Research case
火星探査ローバーの研究開発
探査ローバーの統合設計と評価
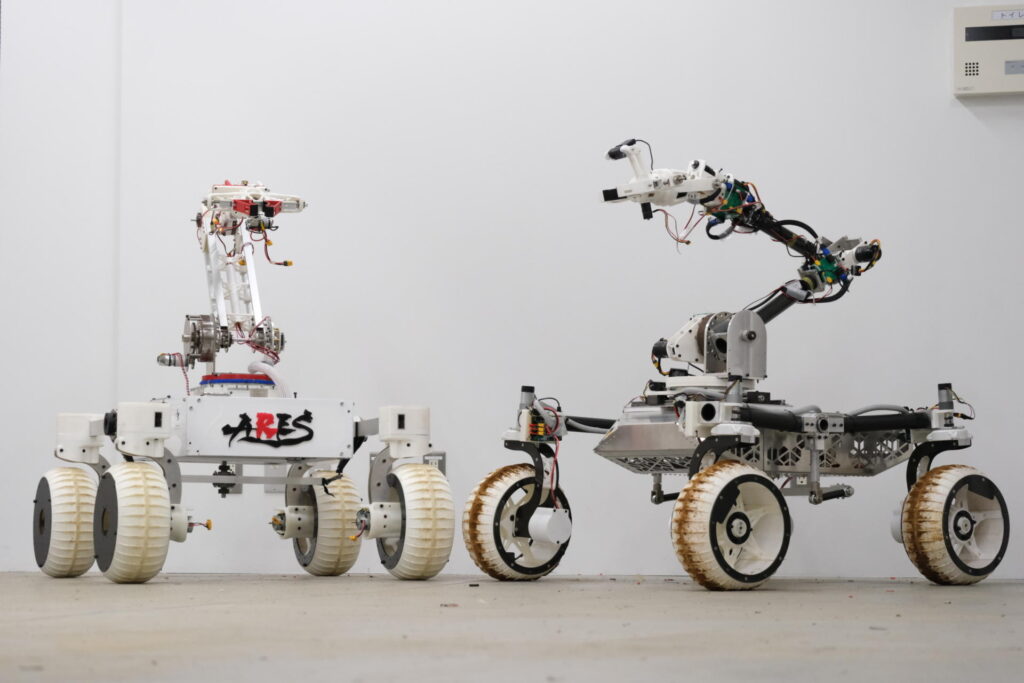
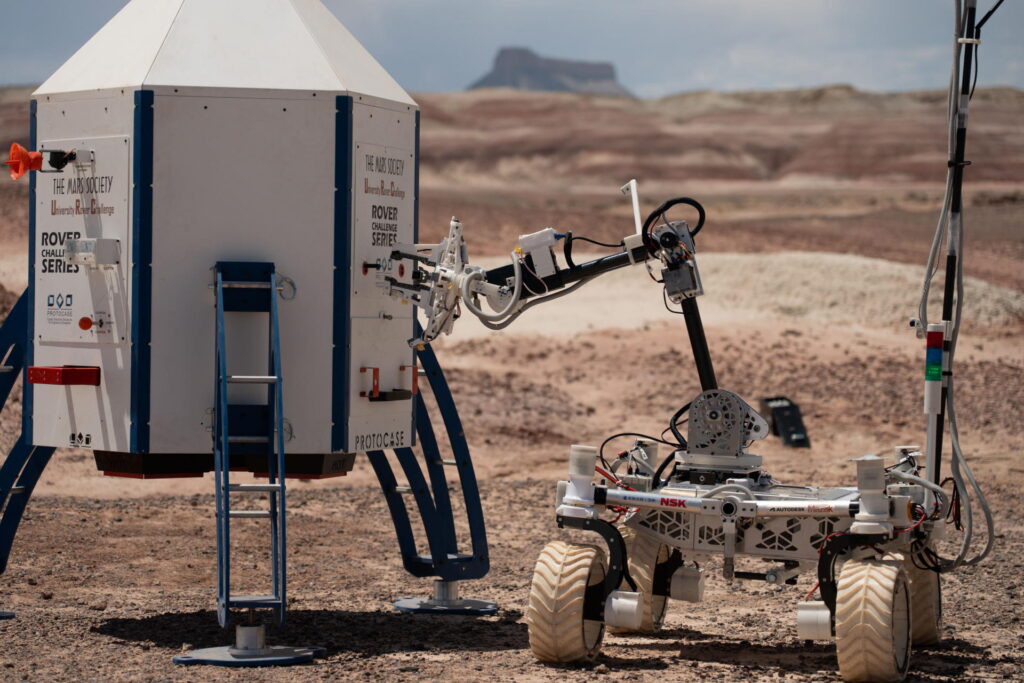
月・惑星探査を想定した4輪走行型探査ローバーの研究開発に取り組んでいます。写真の例は、シートメタルモノコック構造、高可動域のロッカーサスペンション、衝撃吸収性を持つ柔軟タイヤ、4輪独立駆動・操舵機構を搭載し、さらには、5+1自由度のマニピュレータを統合し、試料採取や機器操作などの多目的作業に対応可能な火星探査ローバーになっています。国内外の模擬天体表面環境での実証実験を通じて、重心移動や地盤変形が走行性能に与える影響や、統合設計と適応制御に関する研究を行っています。
軟弱地盤における移動戦略と設計指針の検証
4輪走行型探査ローバーを用いた実地実験により、タイヤ形状(柔軟材タイヤ/リブ付き剛性タイヤ/リブなし剛性タイヤ)、重心位置、走行モード(斜行、横移動、ジグザグ登坂など)が軟弱地盤での走破性に与える影響を定量的に評価しています。グラウザ設計や重心配置、戦略的な走行モードの選択が登坂性能や安定性に及ぼす影響の評価や、将来の惑星探査ローバの設計指針に関する研究を行っています。
逐次学習制御と自律復帰機構の研究
軟弱地盤でのスタック・転倒からの自律復帰を目指して、オンボード逐次学習を導入した軽量制御アルゴリズムに関する研究を行っています。実機環境で観測データに基づき方策を逐次更新することで、失敗を許容しつつ探査継続を可能にし、従来のリスク回避型戦略からリスク包含型の能動的探査戦略への転換の実現に向けて取り組んでいます。
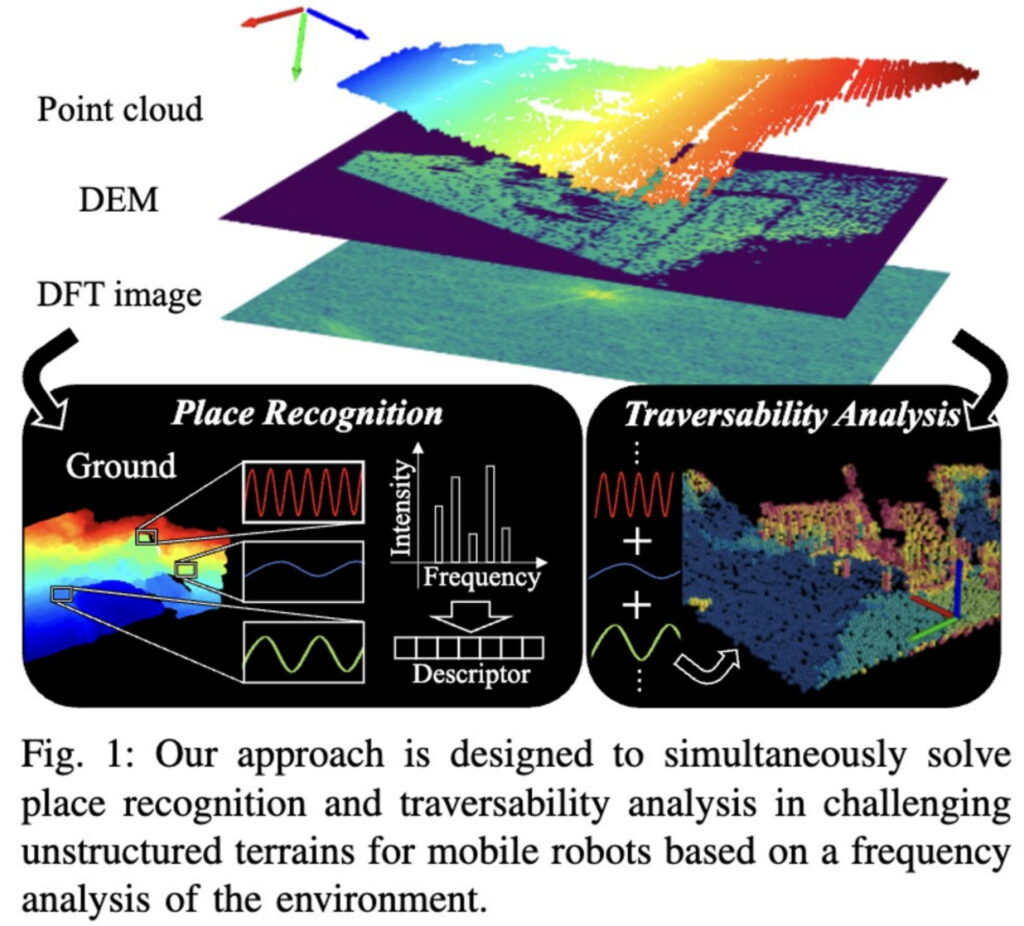
SDFT (Structual Discrete Fourier Transform) : 場所認識と走行可能性解析のための構造離散フーリエ変換
本研究は、月・惑星探査ローバーが既知の地図上で自己の位置と姿勢を推定するVisual Localizationに関するものです。入力画像(クエリ)から自己位置を推定する代表的な手法にPlace Recognitionがあります。これは、データベースに保存された画像群の中から入力画像と外観が共通するものを検索することで実現されます。しかしながら、月面のような環境では外観が多くの場所で類似しており、外観特徴のみに基づくPlace Recognitionは高精度な推定が困難です。さらに、不整地である月面をローバーが安全に走行するためには、常に走破性の予測を行う必要がありますが、これら二つの課題を同時に効果的に解決する研究はこれまで事例がありません。
そこで本研究室では、月面地形の特徴を活用することで、高精度なPlace Recognitionと走破性予測を同時に実現する手法に関する研究に取り組んでいます。具体的には、緩やかな月面の地形形状を異なる周波数成分の集合として表現し、より詳細な地形特徴を記述します。高周波成分は凹凸の激しい領域を意味するため、これを事前に検知して回避行動を取ることで、安定した走行が可能となります。
月面データセットを用いた実験により、提案手法は従来手法と比較して高精度なPlace Recognitionを実現できることを確認しています。また、周波数特徴に基づき地形の凹凸を検知できることも定性的評価によって確認されています。